欢迎您来到欧亚国际APP(中国).欧亚体育官网登录



来源:欧亚体育官网 作者:欧亚体育官网登录|发布时间:2024-09-08 09:26:43
不过显然模界中的无刷电机与这个励磁电机并不是同一个东西,那么我们常用的无刷电机里面究竟有些什么技术、如何解释那些专业名词、以及各种参数和设备之间究竟有什么区别和联系呢?今天就带大家全面了解一下模界常用的无刷电机。

有刷电机:我们也称为直流电机或者碳刷电机,是历史最悠久的电机类型,也是目前数量最多的电机类型。电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。这种电机具有造价相对较低、扭力高、结构简单、易维护等优点。
3、由于换向器存在,限制了转子惯量的进一步下降,影响了动态性能。所以在模界主要应用于速度较慢和对震动不敏感的车模、船模上面,航模很少采用有刷电机。

无刷电机:这是模界中除了有刷电机以外用的最多的一种电机,无刷直流电机不使用机械的电刷装置,采用方波自控式永磁同步电机,以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料,性能上相较一般的传统直流电机有很大优势。具有高效率、低能耗、低噪音、超长寿命、高可靠性、可伺服控制、无级变频调速等优点,至于缺点嘛……就是比有刷的贵、不好维护,广泛应用于航模、高速车模和船模。
不过,单个的无刷电机不是一套完整的动力系统,无刷基本必须通过无刷也就是电调的控制才能实现连续不断的运转。普通的碳刷电机旋转的是绕组,而无刷电机不论是外转子结构还是内转子结构旋转的都是磁铁。所以任何一个电机都是由定子和转子共同构成的。
无刷电机的定子是产生旋转磁场的部分,能够支撑转子进行旋转,主要由硅钢片、漆包线、轴承、支撑件构成;而转子则是黏贴钕铁硼磁铁,在定子旋转磁场的作用进行旋转的部件,主要由转轴、磁铁、支持件构成。除此之外,定子与转子组成的磁极对数还影响着电机的转速与扭力。
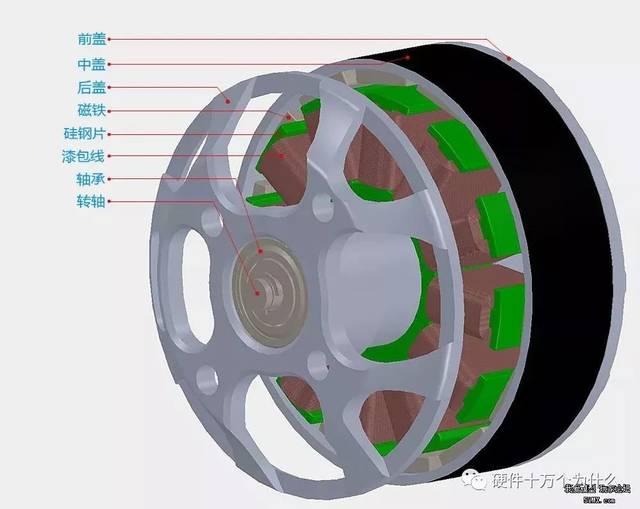
无刷电机的前盖、中壳、后盖主要是整体结构件,起到构建电机整体结构的作用。但是外转子无刷电机的外壳同时也是磁铁的磁路通路,所以外壳必须是导磁性的物质构成。内转子的外壳只是结构件,所以不限定材质。但是内转子电机比外转子电机多一个转子铁芯,这个转子铁芯的作用同样也是起到磁路通路的作用。
磁铁:是安装在转子上,是无刷电机的重要组成部分,无刷电机的绝大部分性能参数都与磁铁相关,包括功率、转速、扭矩等。
硅钢片:是有槽无刷电机的重要组成部分,当然,无槽无刷电机是没有硅钢片的,但是目前绝大多数的无刷电机都是有槽的。它在整个系统中的作用主要是降低磁阻、参与磁路运转。
轴承:是电机运转顺畅的保证,轴承可以分为滑动轴承和滚动轴承,而滚动轴承又可以细分为深沟球轴承、滚针轴承和角接触轴承等十大类,而目前大多数的无刷电机都是采用深沟球轴承。

直流无刷电机动力系统由转子、定子和位置传感器三部分等组成。位置传感按转子位置的变化,沿着一定次序对定子绕组的电流进行换流(即检测转子磁极相对定子绕组的位置,并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关电路,按一定的逻辑关系进行绕组电流切换)。定子绕组的工作电压由位置传感器输出控制的电子开关电路提供。
采用磁敏式位置传感器的直流无刷电动机,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时产生的磁场变化。
采用光电式位置传感器的直流无刷电动机,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯泡。转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号。
采用电磁式位置传感器的无刷直流电动机,是在定子组件上安装有电磁传感器部件(例如耦合变压器、接近开关、LC谐振电路等),当永磁体转子位置发生变化时,电磁效应将使电磁传感器产生高频调制信号(其幅值随转子位置而变化)。
简单而言,直流无刷电机就是依靠改变输入到无刷电机定子线圈上的电流波交变频率和波形,在绕组线圈周围形成一个绕电机几何轴心全转的磁场,这个磁场驱动转子上的永磁磁钢转动,电机就转起来了,电机的性能和磁钢数量、磁钢磁通强度、电机输入电压大小等因素有关,更与无刷电机的控制性能有很大关系,因为输入的是直流电,电流需要电子调速器将其变成3相交流电,还需要从遥控器接收机那里接收控制信号,控制电机的转速,以满足模型使用需要。
总的来说,无刷电机的结构是比较简单的,真正决定其使用性能的还是无刷电子调速器(也就是电调),好的电调需要有单片机控制程序设计、电路设计、复杂加工工艺等过程的总体控制,所以一般来说价格要比无刷电机高出很多。
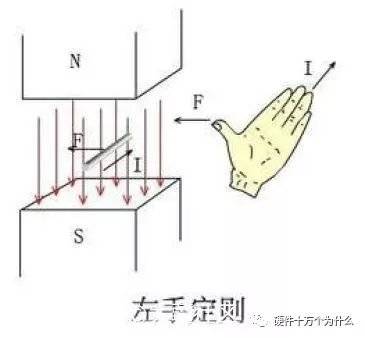
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
右手定则,这是产生感生电动势的基础,跟左手定则的相反,磁场中的导体因受到力的牵引切割磁感线产生电动势。
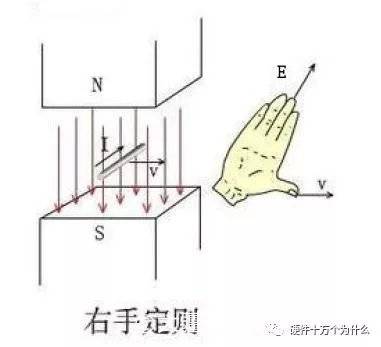
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。不信可以试试。
右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
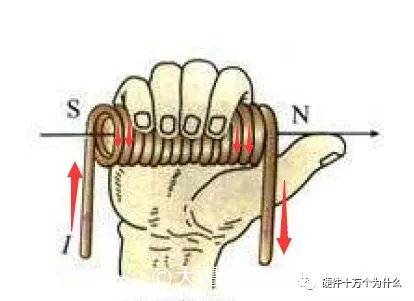

当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。注意这里说的是“力矩”最大,而不是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。补充一句,力矩是力与力臂的乘积。其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动
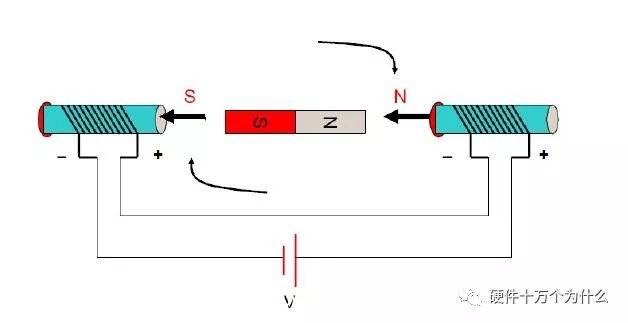
如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。改变电流方向的这一动作,就叫做换相。补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
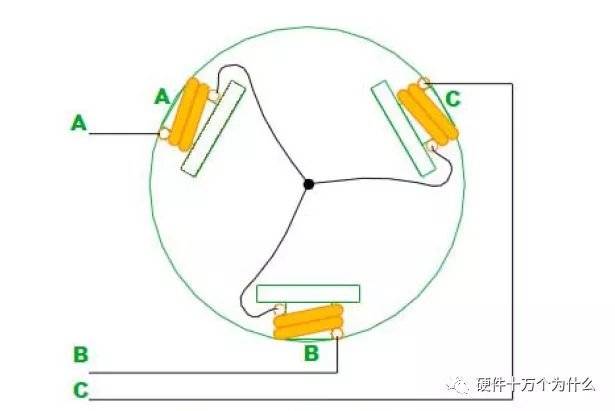
上图显示了定子绕组的联结方式(转子未画出假想是个二极磁铁),三个绕组通过中心的连接点以“Y”型的方式被联结在一起。整个电机就引出三根线A, B, C。当它们之间两两通电时,有6种情况,分别是AB, AC, BC, BA, CA, CB注意这是有顺序的。
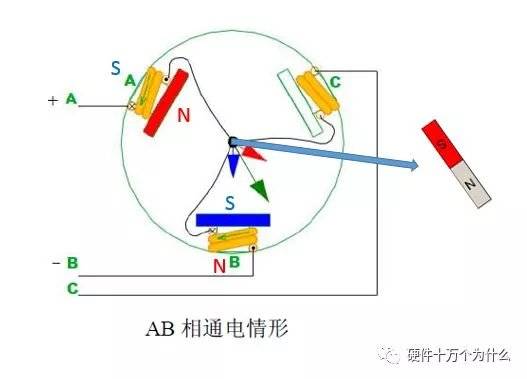
当AB相通电,则A极线圈产生的磁感线方向如红色箭头所示,B极产生的磁感线方向如图蓝色箭头所示,那么产生的合力方向即为绿色箭头所示,那么假设其中有一个二极磁。