欢迎您来到欧亚国际APP(中国).欧亚体育官网登录



来源:欧亚体育官网 作者:欧亚体育官网登录|发布时间:2024-09-08 09:12:41
驱动电源方案的设计分析及其验证,通过对基本Buck-boost拓扑研究变换到Flyback电路,通过对LTC1871电流驱动芯片的应用设计、分析,设计变压器参数目标需求匹配驱动电路,通过PWM供电、NMOS驱动、电流检测、反馈输出电压跟踪闭环调节,实现满足一款Infineon的驱动芯片1ED020I12芯片的驱动电路系统,本方案通过原理设计、电路仿真及电路台架测试,验证了系统性能、安全性高,同时可以通过较少的外围电路实现可靠的供电驱动,降低了电控的成本。
电机控制器是新能源汽车电控产品中一个复杂的系统,其产品价值量较大,涉及的领域较多,有电力电子、微电子、控制理论及电磁兼容 (electro magnetic compatibility, EMC)、电气安全等,其中涉及到的信号控制交互有电源信号、模拟量和数字量信号采集、控制反馈、使能的控制和驱动,涉及到高压达到几百 V,低压几 V 甚至更低,然而,在整个系统中兼顾高低压同时存在控制输入和输出均需要处理,这个系统在电机控制器里面就是绝缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)驱动电源的供电驱动电路,目前,在电机控制器中由于涉及到驱动 IGBT 的电源应用绝大部 分都是反激 (flyback)电路系统,升降压变换器(buckboost)拓扑演变而来,因为其输出与输入的关系,也称作反激电路,这个变压器也称为反激变压器,同时也因为其功率整体较小,一般 15 W 左右,作为系统的一部分,去除变压器后,将其电路单端初级电感式转换器 (single ended primary inductor converter, SEPIC) 拓扑应用在电机控制器的 DC-DC 电路中,给系统低压供电,这个电路输入 9-16 V,输出 12 V,究其原因,主要还是变压器的功率设计和功耗及结构的制约,上述电路在整体上大部分相同或相似但却无法实现功能的同时还可以实现输入和输出的隔离及经济性和可靠性。为了更好地将 Flyback 电路应用在新能源汽车驱动 IGBT 上,先概述下 buck 电路,也就是降压电路,这个相对于 boost 升压电路,参考如图 2,电源电路中,通常都是需要电感、NMOSFET 及二极管、电容,再加上一些辅助电阻或光耦电路来完成,实现整个的电压转换 DC-DC。另外,如下图 1,拓扑结构中,还需要一个最为重要的控制反馈系统来实现 PWM 输出控制,相对于新能源汽车中 OBC 的 PFC 电路不同,这个 PWM 通常是一个具有电流型 PWM 芯片来完成,具备每个周期调节及过阈值保护功能,无需要再通过专用额外的 DSP 芯片来实现控制,目前这样的控制芯片,各大主流芯片厂家都有,如 TI 的 UC3844、UC3846 等,LinearTech 推出的 LTC1871 等都是非常卓越的芯片,这类是已经根据负载调整其占空比及电流反馈环节,根据负载端反馈同时实现原有的电压反馈,本文是基于反激电源原理 LTC1871 设计一个 IGBT 驱动电源电路系统。
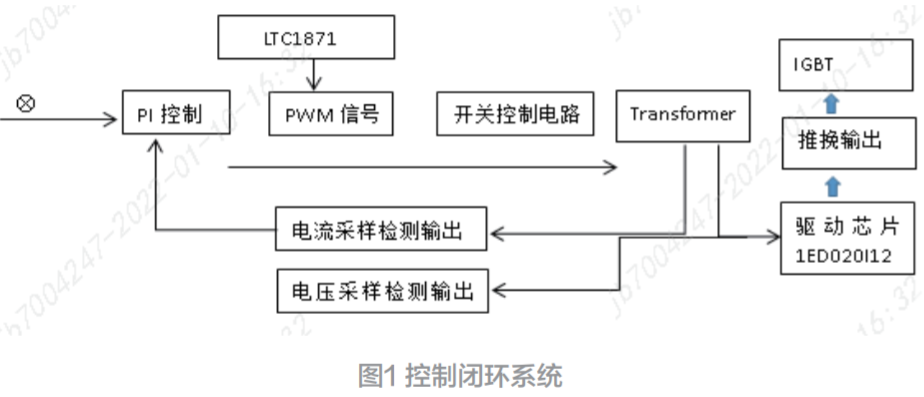
如下图 1,本方案是基于 LTC1871 电流型 PWM 芯片为核心建立一个双闭环稳定的一阶系统,通过对输出电压反馈应用的控制,可以实现在输入直流电压波动的 情况下,通常波动范围在 9-16 V,对 IGBT 驱动芯片的供电进行控制及调节监控使得其在不同负载状态下,如空载、轻载和满载均能可靠输出驱动,保证电机控制器供电安全,尤其是在 IGBT 开关控制和导通时能保证平稳工作,实现 IGBT 驱动供电在正电压、零电压、负电压下可以全时序工作,驱动电源通常的电压典型值有+15 V、0 V、-8 V 等值。
电流及电压控制系统遵循如下图 1 的传输控制,输入电压、算法计算、PI 调节控制、PWM 生成控制、电流芯片输出、NMOSFET 驱动及电流采集检测、转换反馈,输出电压反馈给输入电压回路再进行误差比较达到输出稳定。
上述图 1 的系统原理用电路拓扑可表示成如下图 2 的拓扑基本变换:输入电压经过 Q2004,为开关控制功率器件 NMOSFET 管,其耐压、导通、输出电流需要承担一定负载及带载切换能力,如导通关断应力等,NMOSFET 的 G 极控制信号为 PWM 信号,其电平幅值约 1 ~ 4 V PWM 高频信号,频率可达 80 ~ 150 kHz,占空比 0 ~ 95%, 实际考虑到谐波因素等,通常控制在 50% 左右,根据配置电流芯片控制需求,输出检流电阻,输出储能电感,导通时充电,关断时放电及输出滤波功能。续流二极管在其导通时, LC 形成回路并对 DC 输出形成滤波。根据输出电感结构重组,调整电路信号二极管方向和 GND,变成似共模线圈、共模电感结构,并将输入输出断开做成绕组变压器结构,这个结果就从电感变化成变压器,通过绕组的裂变实现电压的迁移转化实现本方案的 LTC1871 拓扑驱动电源。
通过前面 PWM 输出信号控制 NMOSFET 进行驱 动,然后通过变压器的驱动输出得到 +15 V 给驱动芯片 1ED020I12 实现正负电压供电,得到 5 V 电压源反馈给 系统并同时可以作为供电电压输出给电机控制器内部使用,保证供电稳定性,并反馈输出电压给反激驱动电路, 通过变压器开关输出实现负反馈过程。最终达到供电驱动、采集、反馈输出循环稳定系统。变压器的吸收 RC 和 NMOSFET 检流电阻及反馈直接影响到 5 V 电压源输出,并影响到 VO 电压的幅值调节,如果作为 IGBT 高压采集系统供电,还会影响到母线采集,因此需要重点关注。
(1)通过NMOS管的Vds波形的变化可知,变更前,MOS 管存在未能按照开关信号快速进行开关动作不变或滞后,且在调整Vin 过程中,开关信号占空比不自动调整,由于变压器的原因,最大占空比会受到一定的限制,这导致开关电源的输出功率能力不足;设计优化点考虑调整 PWM 输出及反馈,使得 MOS 管根据开关信号快速动作,且开关信号占空比随Vin 的变化而相应的进行调整,很好地提高了开关电源的输出功率能力。
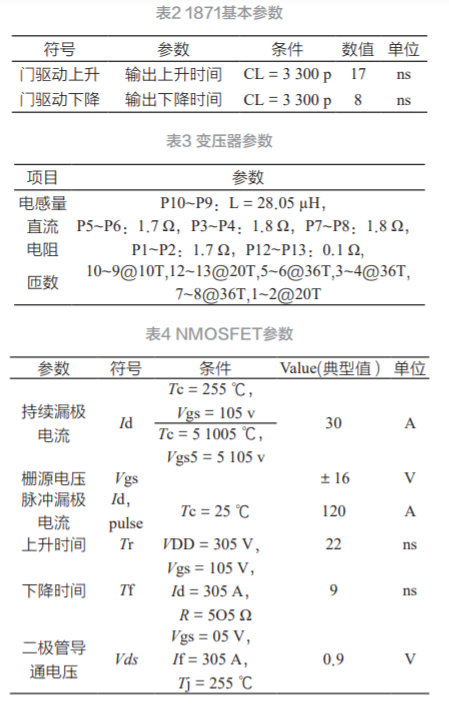
图 3 说明基于 LTC1871 设计一种 Flyback 控制驱动电路,其上图为控制信号原理,下图为电路设计原理,电路中根据前述的设计目标,进行变压器的设计,主要关联如下几个重要参数变量,需要定制化其电感量,在 10 Hz 下,大约 28.05 μH 输入端,输出端的直流电阻 1.7 Ω、1.8 Ω、0.1 Ω,满足驱动三相正极 80 mA,输出电源 5 V 隔离需求 0.5 A,其中额定需求满载能力较小,15~20 mA,满足启动需求。变压器的 P10 为 Drain 极, 作为输入信号,P9 为 DC 输入,9~16 V 范围,信号经过输入电感后再进入变压器输入端,变压器的 P10 连接 NMOSFET,通过 MOSFET 根据开关信号快速动作,开关信号占比跟随Vin 变化而相应的进行调整,调节变压 器的占空比,实现驱动电流负载应用变化能力。可通过调整变压器耦合连接阻值 RC 进行调整。占空比越大,输出电压值越高,NMOSFET 和二极管承受的电压应力越大。
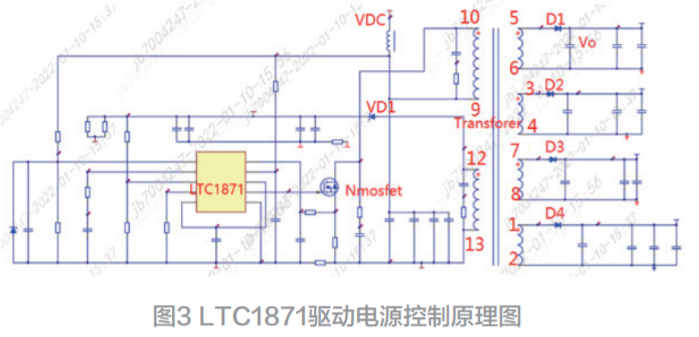
当 NMOSFET 导通时,变压器的原边有电流流过,由于电流不同相位,副边没有电流,当 NMOSFET 关断时,副边的二极管导通给负载提供能量产生电压电流 输出。依据电路分析,确定变压器的初次级主要匝数比,保证电感尖峰产生的电流和电压能够匹配 NMOSFET 的性能参数,保证Np:Ns处于合理范围内:
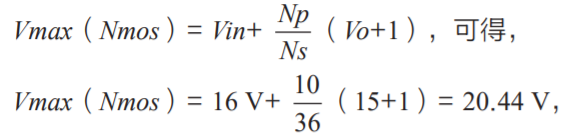
满足设计需求。根据开关二极管电流等同于输入电流原则,根据电路参数计算输出电压:当线圈处于 CCM 时:
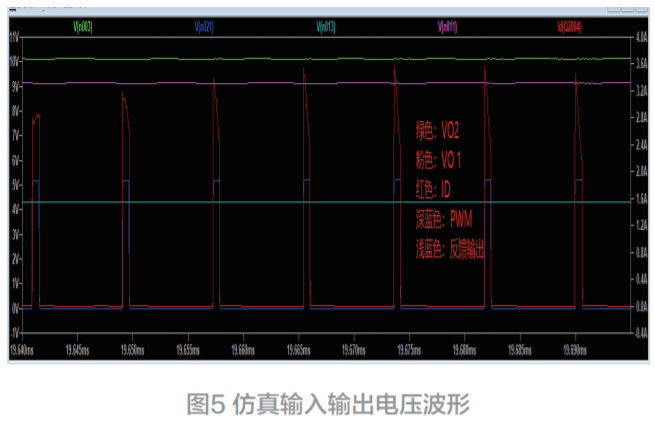
从 Pspice 仿真上看,进行输入和输出各参数进行仿真观测各变量是否存在异常,需要更新调整部分参数和阈值,使得输入电压 PWM、Vds、V0(包含 V01 和 V02 等),ID。下图中波形从上往下,依次为变压器副边输出端二极管后输出电压 V02( 图 3 上图中变压器输出第一级),输出变压器副边输出端二极管输出电压 V01( 图 3 上图中变压器输出从上至下第四级),NMOSFET 输出电流 ID,NMOSFET 输入端的 PWM 控制波形;通过对输入端 9-10 中控制信息输入 PWM 进行仿真、仿真各主要参数还有输出 V01 和 V02, NMOSFET 的输出电流 ID 以及反馈端输出电压,通过图 5 波形来看,基本达到了驱动需求波形,但是输出 V01 和 V02 电压存在微小波动在 50 µs 内,波动范围约 100 mV,红色波形为 ID 电流波形,是 Nmos 输出电流,从波形上看,基本维持值在 3 A 左右,波形走向趋势基本一致,整体来看,波形较为干净,在 1 µs 内无杂波,周期约 70 ms,与此波形周期高度重合的时约幅值 5 V 的 PWM 控制波形,波形正常无振荡谐波,高低电平幅值符合 LTC1871 芯片输出参数要求,通过上述各类波形周期性测试,在更长的周期内未有发现新的谐波及振荡,说明图 3 电路设计稳定,参数取值整体合理可控,为后面台架测试实现理论可靠性依据。
IGBT 驱动供电电路系统搭建完成,进行台架测试,保证在静态、高压开启、带转速带载时,能满负荷输出保证 IGBT 的驱动供电,通过上下桥臂导通切换,实现变压器及回路带载能力验证,波形及导通时间是否异常,通过变压器的参数调整,验证驱动波形有无受到限制。从下图来看Vds 出现振荡,存在 0.8 µs 振荡时间, 震荡周期在 8 µs 左右。另,在高电平其实出现过冲及下降震荡,震荡周期较小但是震荡的幅度较大,影响到 管子的关断和导通。在低速 500 rpm 时,小扭矩时,容易出现输入Vds 产生电源电压骚扰波形,形似正弦波;低速时,随着扭矩增加,输入的正常电压中出现振动骚扰波形,输出可能会叠加,也可能拉低,如叠加将产生更高的输出电压,这将使输出的 D2 承受更高的冲击,如相反拉低,将会使得该段时间周期内没有电压输出或很低,将会出现输出驱动能力不够,转速升高,出现振荡失真,导致该段输出也出现无正向输出。通过调整反馈输出端和芯片 ITH、FREQ 及变压器 pin 9-10、12-13 的电阻值。
(1)当Vin = 18 V 时,整流二极管两端的最大反向电压达到 102 V,RC 电路的电容耐压为 100 V,存在风险;
(2)取消调整输出端的 RC,重新测试,整流二极 管两端的最大反向电压达变化小,符合设计要求Vout 输出正常,控制器联调正常,如下波形;
(3)变更前,需要Vin 大于 14 V 时,Vout 才能稳定输出;变更后,Vin 大于 8 V 时,Vout 就可以稳定输出。通过调整电路参数,电源的输出功率显著提高,提供电源的稳。